16 июня, 2010
Радиолокаторы наведения системы ПРО «А» (1)
Малые размеры и прочная конструкция головной (боевой) части баллистической ракеты делали ее труднообнаруживаемым объектом для радиолокационных станций ПВО и малоуязвимой для поражения боевым снаряжением ЗУР. Некоторые видные ученые и специалисты считали, что создать средства для противоракетной обороны, как и действующую систему ПРО в целом, в принципе невозможно.
Начальный этап. В научно-техническом плане особенность проблемы ПРО состояла в ее комплексном характере, когда решения частных взаимно связанных научно-технических проблем должны гармонично вписываться в решение проблемы в целом. Именно комплексный характер проблемы ПРО составлял (и составляет поныне) ее основную суть. Поэтому общая концепция начального этапа исследований проблемы ПРО, сформулированная главным конструктором (с 1958 г. – генеральный конструктор) Г. В. Кисунько, предусматривала разработку полигонного комплекса ПРО в качестве экспериментальной базы для создания научного задела в интересах построения системы ПРО.
Для проведения работ по ПРО в феврале 1955 г. в составе КБ-1 было создано специальное конструкторское бюро (СКБ-30, впоследствии – НИИ радиоприборостроения), в котором с момента его образования работают авторы. К работе по проблематике ПРО привлекалась широкая кооперация НИИ, КБ и заводов промышленных министерств, Министерства обороны СССР, а также АН СССР.
В соответствии с этой концепцией была начата разработка эскизного проекта экспериментальной системы «А». В процессе разработки эскизного проекта были проведены уникальные экспериментальные исследования рассеивающих способностей головных частей на моделирующей установке методом электродинамического подобия. Полученные материалы, несмотря на невысокую точность измерения, представляли собой исключительную ценность. Необходимо было подкрепить их экспериментальными данными, полученными в натурных условиях полета баллистических ракет. Эта задача, стоявшая перед разработчиками средств ПРО требовала решения в первую очередь.
Проектирование экспериментальной радиолокационной установки РЭ, фактически первой в стране РЛС ПРО, было завершено в 1955 г. Она должна была размещаться в районе точек падения баллистических ракет при их испытательных пусках.
Беспрецедентные по объему и напряженности работы по созданию технологических объектов системы «А» и инфраструктуры полигона начались в июле 1956 г. Объекты возводились в казахстанской полупустынной степи Бет Пак Дала в районе озера Балхаш. Первым технологическим объектом, подлежащим вводу, была экспериментальная радиолокационная установка РЭ. Эти работы были завершены в короткие сроки. В 1957 г. на полигоне системы «А» были впервые осуществлены обнаружение и сопровождение головных частей отечественных баллистических ракет радиолокационной установкой РЭ и начато изучение характеристик отраженных от них сигналов.
По структуре построения это был однолучевый радиолокатор с полноповоротной двухзеркальной антенной диаметром 15 м. Запитка зеркала осуществлялись рупорным облучателем. Антенна РЭ-10 располагалась внутри сферического обтекателя, вращающегося вместе с антенной по двум осям.
Передающее устройство импульсной мощностью 2 МВт было заимствовано от радиолокатора системы ПВО С-25.
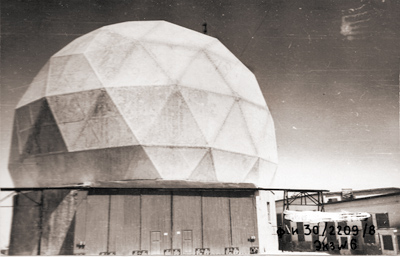
Жесткое укрытие антенны канала противоракеты
Приемное устройство состояло из двух линеек усилителей. Построено по схеме супергетеродина с двойным преобразованием частоты. Основной усилитель имел линейную характеристику усиления и выход на дальномерное устройство, второй – логарифмическую характеристику усиления в пределах широкого динамического диапазона изменения амплитуд принятых сигналов.
Радиолокатор обеспечивал обнаружение головной части баллистической ракеты по целеуказанию на дальности около 400 км и ее автоматическое сопровождение только по дальности. В целях упрощения построения радиолокатор не имел аппаратуры измерения угловых координат, вследствие чего поворот антенны на цель и слежение за целью по угловым координатам осуществлялись в пассивном режиме по внешним данным.
Наведение луча антенны РЭ на цель производилось силовыми приводами, связанными сельсинными машинами с оптическим телескопом КТ-50. Выбор такой схемы наведения радиолокационной установки РЭ на баллистическую ракету являлся вынужденной мерой, обусловленной отсутствием в ее составе вычислительных средств, которые позволяли обеспечить расчет траектории движения и выдачу достаточно точного целеуказания в реальных условиях полета баллистической ракеты.
В 1958 г. радиолокационная установка была модернизирована. Передающее устройство, волноводный тракт с облучателем и входной усилитель приемного устройства были заменены вновь разработанными устройствами, обеспечивающими работу на несущей частоте радиолокаторов точного наведения (РТН) системы «А». Радиолокационная установка РЭ после модернизации стала именоваться РЭ-2.
Жесткое укрытие антенны канала цели
Импульсная мощность передающего устройства была повышена до 10 МВт. Проблема передачи и излучения такого высокого уровня мощности была решена применением в антенне 4-канального волноводного тракта и 4-рупорного облучателя.
Для обеспечения высокой точности измерения отражающих поверхностей головных частей баллистических ракет (после модернизации) было проведено тщательное измерение энергетических параметров радиолокатора, завершенное калибровкой их совокупности (потенциала) по эталонным сферам, которые запускались с помощью метеорологических шаров-зондов. Эталонные сферы, впервые использованные на РЭ-2, оказались чрезвычайно удобным средством как контроля и калибровки энергетических характеристик радиолокатора, так и измерения абсолютных величин отражающих поверхностей целей и широко применялись при испытаниях радиолокаторов ПРО на полигоне. Так, для проведения испытаний радиолокаторов системы ПРО А-35 были разработаны и выведены на орбиту специальные искусственные спутники земли (ИСЗ) серий ДСП-1 и ДСП-1Ю, а также «Тайфун», имевшие сферическую форму.
Помимо плановых проводок баллистических ракет, в том же 1958 г. впервые в отечественной (да и в мировой практике) радиолокатором РЭ-2 были осуществлены многократные проводки по отраженному сигналу третьего советского искусственного спутника Земли. Наведение луча антенны РЭ-2 на ИСЗ в этих работах производилось кинотеодолитом КТ-50. Тем самым была экспериментально подтверждена возможность точного измерения координат не только баллистических, но и высокоскоростных малоразмерных космических объектов.
Радиолокационная установка была укомплектована аналоговой аппаратурой кино- и фоторегистрации, включавшей наряду с авиационными кинокамерами типа АКС-40 специально разработанные безобтюраторные камеры РЭ-803 с непрерывной подачей кинопленки. Запись производилась с экранов осциллографов, имевших синее свечение, совместно с метками времени, поступавшими с частотой 1 Гц и 10 Гц от системы единого времени. Амплитуда отраженного сигнала сопровождаемой цели с выхода логарифмического приемного устройства записывалась на фотографическую бумагу шлейфовыми осциллографами.
На камерах РЭ-803 производилась запись каждого отраженного от цели сигнала с частотой повторения, соответствовавшей частоте излучения сигнала радиолокатора. Анализ записей, осуществленных этой камерой, позволял не только выявлять особенности тонкой структуры отраженных сигналов, но и устранять различные неисправности, возникавшие в радиолокаторе в ходе работы.
Отметим попутно, что записи на аналогичных камерах РЭ-803, установленных на радиолокаторах точного наведения системы «А», были использованы для оценки промаха в пуске № 59 24 ноября 1960 г. Для этого использовались записи сигналов, отраженных от головной части БР и противоракеты (ПР), зафиксированные на последних секундах перед точкой встречи на одних и тех же кадрах.
Статистическая обработка материалов записей на аппаратуре регистрации, произведенных на экспериментальных установках РЭ, РЭ-2, осуществлялась на первой в КБ-1 и одной из первых в стране электронной вычислительной машине «Стрела».
Проведенные на РЭ и РЭ-2 работы по ракетам Р-2 и Р-5 и ИСЗ в 1957–1958 годах, а также полученные экспериментальные материалы по их радиолокационным характеристикам позволили подтвердить возможность обнаружения и высокоточного сопровождения головных частей баллистических ракет, а также ИСЗ на проектных дальностях радиолокаторов точного наведения системы «А» и тем самым заложили прочный фундамент для всех последующих работ по ПРО.
Передатчик канала противоракеты
Радиолокационные средства экспериментальной системы ПРО (система «А»). Эскизное проектирование экспериментальной системы «А» было завершено коллективом СКБ-30 под руководством Г. В. Кисунько в марте 1956 г.
Принципиальная новизна структуры построения системы «А» состояла в том, что в состав ее средств была включена быстродействующая цифровая электронная вычислительная машина (ЭВМ). Это обуславливалось требованием обеспечения высокоточного прогноза движения БР, что можно было сделать только интегрированием достаточно сложных уравнений движения тела в поле тяготения Земли, и реализации не менее сложного алгоритма автоматического выполнения боевого цикла по организации управления средствами, получения и обработки информации и управления ПР при наведении ее на цель в скоротечном процессе перехвата головной части баллистической ракеты, когда скорость сближения цели и перехватчика может достигать величин до 7–10 км/с. Решить такую задачу с использованием традиционных в то время в ПВО аналоговых вычислительных средств было невозможно.
Вторым не менее важным новым решением в структуре системы «А» было использование многопозиционного принципа построения радиолокационных средств измерения координат целей и ПР, основанного на измерении дальностей (метод «трех дальностей»). При этом три радиолокатора точного наведения располагались в вершинах равностороннего треугольника, вписанного в окружность радиуса 85 км с центром в предполагаемой точке падения баллистических ракет. Наиболее вынесенный вперед РТН располагался там же, где и радиолокационная установка РЭ-2.
Большая скорость баллистической ракеты сокращала и без того сжатый баланс времени системы ПРО, что в свою очередь требовало высокого энергетического потенциала РТН для обеспечения требуемой дальности и максимальной точности сопровождения баллистической цели. Необходимый потенциал был достигнут соответствующим выбором частотного диапазона и электровакуумных приборов с предельными уровнями создаваемой СВЧ-мощности, использованием больших диаметров раскрыва антенн и минимизацией потерь на неточность наведения максимумов лучей РТН на цель.
Автоматическое управление работой средств системы при наведении ПР на цель осуществлялось центральной вычислительной станцией (ЦВС) по дуплексным цифровым радиорелейным линиям связи.
Ход работы на командном пункте, оборудованном громкоговорящей связью и другими видами связи, контролировался по центральному индикатору системы (ЦИС). По этой связи передавались команды и принимались доклады о готовности средств к работе.
Создание вычислительных средств для системы «А» в Институте точной механики и вычислительной техники (ИТМ и ВТ) АН СССР было завершено в 1958 г. ЦВС размещалась на объекте № 40 полигона системы «А». В состав ЦВС входили ЭВМ М-40 и ЭВМ М-50 (главный конструктор С. А. Лебедев). На ЭВМ М-40 возлагалось управление рабочим циклом по перехвату головной части баллистической ракеты ПР в соответствии с алгоритмом взаимодействия территориально разнесенных средств системы «А» в реальном времени. Производительность ЭВМ М-40 составляла 40 тысяч оп/с над числами с фиксированной запятой и ОЗУ объемом 4096 слов. Скорость выполнения элементарного сложения и умножения – 3 на 105 и 5 на 104 сложений и умножений в секунду соответственно. Объем внешней памяти составлял 150 тысяч слов. Асинхронный дуплексный обмен информацией по пяти направлениям радиорелейных линий связи с суммарной скоростью передачи порядка 1 МГц обеспечивался специальным процессором ввода-вывода, входившим в состав ЭВМ М-40.
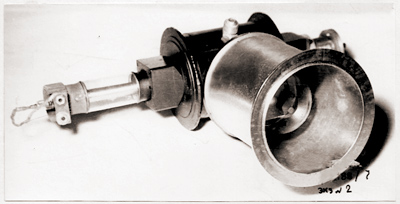
Магнетрон передатчика ПР
ЭВМ М-50 предназначалась для обработки записанной цифровой и аналоговой информации. Она представляла модификацию ЭВМ М-40 для работы с числами с плавающей запятой. ЭВМ М-50 имела развитую систему внешней памяти на барабанах и магнитных лентах.
Обе ЭВМ были связаны между собой межмашинным обменом. Кроме того, каждая из ЭВМ была связана с узлом, расположенным на том же объекте, в котором размещалась контрольно-регистрирующая аппаратура (КРА), разработанная СКБ-30. На КРА осуществлялась запись на магнитной ленте в цифровой форме информации обмена между средствами системы «А» и ЭВМ М-40 по радиорелейным линиям связи. Наличие в ЭВМ М-40 специальных прерываний и устройства КРАП, через которые можно было передавать в ЭВМ информацию, воспроизводимую КРА, позволяло многократно восстанавливать ход работы и при необходимости отрабатывать программу в квазиреальном времени.
Особенностью построения радиолокационных средств системы «А» являлось разделение функций, связанных с обеспечением перехвата головной части баллистической цели, между несколькими РЛС, выполняющими их в тесном взаимодействии между собой при управлении от ЭВМ М-40. Передача цифровой информации и команд управления между средствами системы «А» и ЭВМ М-40 осуществлялась радиорелейными линиями связи, имевшими 16 оконечных и промежуточных станций общей протяженностью 1230 км. Эти линии обеспечивали также передачу сигналов единого времени, служебную телефонную связь, а также синхронную работу всех измерительных средств. По каждому стволу радиорелейной линии передавалось 16 независимых каналов информации, каждый из которых был рассчитан на передачу 14-разрядного двоичного кода. Достоверность передачи – выше 10 в минус седьмой.
Основные функции, выполняемые радиолокаторами системы «А», могут быть условно разделены на две: обнаружение баллистических целей на рубежах, достаточных для целеуказания радиолокаторам наведения, и собственно обеспечение перехвата головной части баллистической ракеты. Первая задача выполнялась станцией дальнего обнаружения «Дунай-2» (главный конструктор В. П. Сосульников).
Передатчик канала цели
В состав радиолокационных средств системы «А», обеспечивающих выполнение непосредственно задач перехвата БР, входили:
– радиолокационная станция вывода противоракеты (РСВПР);
– радиолокаторы точного наведения.
В 1958 г. радиолокационные средства системы «А» на полигоне были введены в строй и начаты стыковочные работы с ЭВМ М-40.
РСВПР (главный конструктор С. Я. Рабинович) обеспечивала захват и вывод противоракеты. После подъема на заданную высоту производился захват и автосопровождение ПР каналом противоракеты РТН.
Аппаратура трех РТН (за исключением антенных устройств) предварительно развертывалась на площадях СКБ-30, состыковывалась между собой, и проверялось их совместное функционирование с ЭВМ М-40, находившейся в ИТМ и ВТ, в имитационном режиме с передачей информации и команд управления по радиорелейной линии связи между двумя территориально разнесенными объектами.
По структуре построения РТН являлся уникальным комбинированным двухлучевым двухканальным моноимпульсным радиолокатором. Два луча в пространстве формировались двумя антеннами. Излучение и прием информации на каждом из РТН как по цели, так и по ПР осуществлялись на разнесенных друг от друга несущих частотах и частотах повторения. Работа РТН осуществлялась при непрерывном взаимодействии через радиорелейные линии связи с ЭВМ М-40, расположенной на удалении от 100 км до 250 км от них.
В радиолокаторе точного наведения системы «А» использовались две полноповоротные приемо-передающие антенны РС-10 и РС-11, построенные по схеме Кассегрена. Первая из них, предназначенная для работы по цели, имела параболическое зеркало диаметром 15 м. В фокусе антенны устанавливался 4-рупорный облучатель, конструкция которого позволяла обеспечить хорошую развязку между каналами и низкий уровень коэффициента стоячей волны. В передающем режиме все рупоры облучателя работали синфазно и формировали в пространстве один луч, а при работе на прием формируются четыре смещенных луча, создающих мгновенное равносигнальное направление на цель.
Магнетрон передатчика цели
Двухзеркальная антенна удобна тем, что ее фокус, в котором располагается облучатель, находится вблизи вершины рефлектора, и волноводный тракт, подходящий к облучателю, минимальной длины и не имеет изгибов, что особенно существенно для четырехканального волноводного тракта, необходимого для моноимпульсного измерения угловых координат. Четырехканальный волноводный тракт, заканчивающийся четырехрупорным излучателем как в случае применения зеркальной антенны, так и фазированной антенной решетки, являлся наилучшим компромиссом при однолучевом построении стрельбовой РЛС ПРО. Такой волноводный тракт обеспечивал возможность вращения антенны по двум осям при высоких уровнях скорости вращения, подводимой к антенне мощности и точности измерения угловых координат цели. Антенна обеспечивала излучение и прием СВЧ-сигналов линейной поляризации.
Другая антенна диаметром 4,6 м обеспечивала работу по противоракете. Эта антенна имела одноканальный облучатель, осуществлявший излучение и прием СВЧ-сигналов круговой поляризации.
Двухзеркальная схема Кассегрена с параболическим рефлектором и гиперболическим контррефлектором в настоящее время используется весьма широко в наземных радиолокационных и радиосвязных антеннах. Но в то время (1955–1958 гг.) антенны РЭ-10 и РС-10 были первыми крупногабаритными двухзеркальными антеннами в мире.
Передача высоких уровней СВЧ энергии по волноводным трактам потребовала новых решений. Были созданы согласующие переходные устройства с четвертьволновым трансформатором и двойной системой дроссельных ловушек, что позволило сконструировать и применить ранее не употреблявшийся в волноводной практике волноводный тромбонный фазовращатель, позволивший решить ряд проблем, связанных с требованием высокой точности фазировки многоканального тракта. В качестве делителя мощности применена система щелевых мостов вместо волноводных тройников, позволивших обеспечить надежную разводку между каналами и тем самым резко повысить стабильность фазы на выходе облучателя. В трактах применены вращающиеся сочленения с волной Е01 в круглом волноводе. Для увеличения электрической прочности тракт заполнен сжатым воздухом при давлении 3–3,5 ати. Для герметизации волноводного тракта разработаны специальные герметизирующие диафрагмы из ковара с впаянным кварцем, обеспечивающие необходимую электрическую и механическую прочность.
Благодаря тщательной отработке каждого элемента тракта удалось впервые достичь во всех изготовленных трактах весьма высоких показателей: коэффициент стоячей волны 1,35 в диапазоне 5%, синфазность в том же диапазоне не хуже 30°.
В антеннах РТН (РС-10, РС-11) и в антенне РЭ (РЭ-10) применена азимутально-угломестная система, в которой неподвижная ось не вертикальна, а горизонтальна. Выбор горизонтального расположения неподвижной оси был обусловлен тем, что система «А» проектировалась как экспериментальный макет боевой ячейки ПРО. Проектные материалы по расчету возможных точек встречи головной части и ПР показывали, что в зависимости от траектории полета баллистических ракет, атакующих обороняемый район, они могли оказываться в непосредственной близости от направления на зенит (или в зените) для одного из радиолокаторов на удалении до 25 км (а для канала ПР еще меньше).
При обычном вертикальном расположении азимутальной оси антенны невозможно было обеспечить непрерывное сопровождение таких целей из-за необходимости переброса антенны, для осуществления которого требовалось затратить некоторое время. Кроме того, работа радиолокатора в окрестности зенита даже при отсутствии переброса связана со значительным увеличением скорости вращения антенны по азимуту, причем тем большей, чем больше угол места цели. Недопустимость срывов сопровождения цели и ПР на этих участках траектории их движения, а также чрезмерное увеличение скорости вращения антенны на этапе наведения явились основным требованием, определившим выбор ориентации осей вращения.
Антенна с осями Е1 и Е2 имела более сложное опорно-поворотное устройство повышенной прочности, потому что для балансировки поворотной части необходима установка противовесов по каждой оси, что увеличивало вес и моменты инерции. Потребовалось увеличение мощности силовых следящих приводов, которые обеспечивали достаточно точное наведение луча антенны на цель в пределах 0–180 градусов по каждой из осей со скоростями до 13 град/с и ускорениями до 3 град/с2.
Вес подвижной части антенны РС-10 составлял 92 т, РС-11 – 8 т.
Приводы антенны канала цели представляли собой комбинированные следящие устройства, включающие каждый в свой состав вспомогательную цифровую следящую систему (ВСП) и силовой следящий привод (ССП). Мощность ССП РС-10 по осям Е1 и Е2 составляла 70 и 40 кВт, мощность ССП РС-11 – 2 кВт по каждой из осей.
Угловые положения осей антенн определялись оптико-механическими датчиками, выполняющими преобразование углового положения вала в 14-разрядный цифровой код. Сравнение углового положения антенны с цифровыми данными о положении цели, передаваемыми по радиорелейной линии с ЭВМ М-40, осуществляло устройство ВСП, представляющее собой специализированное цифровое устройство, которое обеспечивало сравнение действительного положения антенны по данным с оптико-механического датчика с заданным и образовывало сигнал управления ССП каналов цели и изделия. Устройство выполнено целиком на безнакальных элементах общим числом примерно 700 транзисторов и около 650 полупроводниковых диодов.
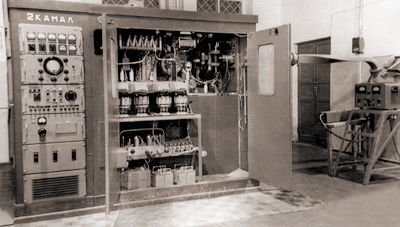
Общий вид передающего устройства
Построенный по такой схеме привод обеспечивал высокоточное наведение максимума диаграммы направленности антенны на цель и тем самым компенсацию угловых ошибок в данных целеуказания, поступающих с ЭВМ М-40 на этапе начала сопровождения, когда траектория цели на ЭВМ построена еще недостаточно точно. Измеренные РТН угловые координаты цели в рабочих алгоритмах работы системы «А» использовались лишь как вспомогательные.
Приводы антенны канала противоракеты не имели дискриминаторов выделения сигналов ошибки и обеспечивали наведение луча антенны на ПР по данным целеуказания, поступающим с ЭВМ М-40.
Для антенн канала цели РС-10 и канала противоракеты РС-11 были впервые в СССР разработаны, изготовлены и установлены на полигоне радиопрозрачные укрытия (антенные обтекатели). Укрытие антенны РС-10 жесткой конструкции «Купол-10» представляло собой усеченный многогранник, вписанный в сферу диаметром 35 метров, собранный из пяти- и шестигранных пирамид, состоящих из более мелких треугольных элементов. Укрытия изготовлены из сотового материала (высота сот 110 мм), поверхность которого оклеена тремя или шестью слоями стеклоткани марки «Т» и полимеризована в печах при температуре около 170°С. Соты были выполнены из бязи и пропитаны специальной смолой. Укрытие обладало высокой прочностью и радиопрозрачностью и было способно выдерживать скоростной напор ветра до 95 м/с.
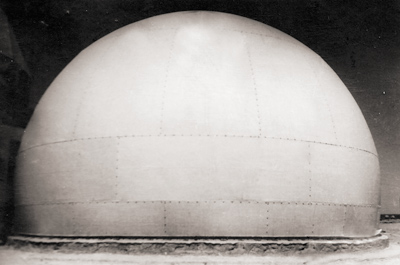
Укрытие «Купол-11» для антенны РС-11 выполнено в виде усеченного шара диаметром 15,5 метра.
Для антенн РС-10 были также разработаны надувные укрытия. Укрытие надувного типа для антенны РС-10 представляет собой шар диаметром 36 метров, срезанный горизонтальной плоскостью на уровне 8245 мм ниже центра сферы. Материал оболочки – прорезиненный капрон. Оболочка поддерживает свою форму внутренним избыточным давлением 20–80 мм водяного столба. Пневматическая оболочка способна выдержать воздействие ветра до 30 м/с.
Продолжение следует
Опубликовано 16 июня в выпуске № 2 от 2010 года
- Комментарии
- Vkontakte
- Читаемое
- Обсуждаемое
- Past:
- 3 дня
- Неделя
- Месяц
В чем вы видите основную проблему ВКО РФ?









