4 июня, 2013
К истории загоризонтной радиолокации
Загоризонтная радиолокация работает в диапазоне декаметровых радиоволн (5–30 МГц), используя свойство радиоволн указанного диапазона отражаться от ионосферы (эффект Кабанова). Ионосфера расположена на высотах 110–400 км в зависимости от сезонно-суточной ситуации и активности солнца. Изменяя частоту и угол места излучения радиоволн, можно добиться освещения земной поверхности на дальностях от 600 км до 10 тыс. км.
СОЗДАНИЕ ЗАГОРИЗОНТНОЙ РАДИОЛОКАЦИИВ СССР в первую очередь начались работы по обнаружению стартов МБР США на дальностях 6–10 тыс. км. Для экспериментальной отработки принципов и алгоритмов обнаружения в 1972 г. в районе города Николаева (Украина) был создан экспериментальный образец загоризонтной РЛС «Дуга-Н» (главный конструктор Кузьминский Ф. А.). Конструктивная зона обнаружения экспериментальной ЗГ РЛС («Дуга-Н») была расположена в восточном направлении, на дальностях от 3 км до 10 тыс. км. Во вторую очередь развития загоризонтной радиолокации в 1974–1975 гг. были проведены пробные работы по оценке возможностей обнаружения воздушных целей (ВЦ) типа Ту-16 на дальностях 1,5–3 тыс. км (руководитель работ Гришин Ю. К.). Результаты были обнадеживающие, но дальнейшее проведение работ на этом макетном аналоговом тракте не имело смысла.
В 1974 г. в Николаеве создан Николаевский филиал НИИДАР для проведения дальнейших экспериментальных работ по загоризонтной радиолокации. В 1975 г. автор статьи был назначен главным инженером НФ НИИДАР.
В 1976 г. начало второго этапа по созданию опытного образца «Дуга-НМ» с цифровой обработкой сигналов на аппаратуре, аналогичной боевой ЗГ РЛС «Дуга № 1», дислоцированной в районе города Чернобыля. В 1976–1978 гг. на опытном образце «Дуга-НМ» проводились натурные обнаружения пусков МБР на дальностях 6–10 тыс. км в рамках заводских и совместных испытаний боевого образца «Дуга № 1». Испытания закончились успешно, но у заказчика (Войска ПВО СССР) появилось чувство неудовлетворенности.
Во-первых, трассы распространения радиоволн были неадекватными. Во-вторых, в ходе этих испытаний выявились противоречия между группами ученых, отвечающих за распространение радиоволн. Дело в том, что трасса распространения радиоволн в конструктивной зоне обнаружения экспериментального образца характеризовалась как среднеширотная, трасса боевого образца (г. Чернобыль) – приполярная.
Прогнозные оценки энергетического потенциала боевого образца были рассчитаны на «скользящий» мод, в реальности в процессе испытаний выявилась тесная корреляция между наличием сигналов возвратно-наклонного зондирования (ВНЗ) за местом старта МБР и результатами обнаружения – «скачковый» мод. Дело в том, что на приполярной трассе сигналов ВНЗ-2 (второй скачок) и ВНЗ-3 (третий скачок) было гораздо меньше, чем на среднеширотной трассе.
Это подвигло к поиску других направлений действия загоризонтной радиолокации, и в 1978 г. была заключена с гензаказчиком (ГУВ Войск ПВО) НИЭР «Экспериментальная отработка методов загоризонтного обнаружения воздушных целей». Головным исполнителем НИЭР стал НФ НИИДАР, автор был назначен научным руководителем. У НФ появилась самостоятельная тема работ.
В этом нас поддерживал заместитель министра радиопромышленности СССР Марков В. И. Дело в том, что РЛС загоризонтного обнаружения воздушных целей предназначена для обнаружения ВЦ на дальностях от 900 км (ближний рубеж) до 3 тыс. км (дальний рубеж). А это обеспечивается одним скачком сигналов ВНЗ, то есть проблемы существования второго и третьего скачков снимаются. Сразу же было принято решение о цифровой обработке сигналов – с выходов приемника аналоговый сигнал преобразовывался аналого-цифровым преобразователем (АЦП) в цифру, а далее вся обработка осуществлялась в специализированной цифровой вычислительной машине (СЦВМ). Были разработаны и программно реализованы алгоритмы обнаружения, сопровождения (траекторная обработка) и др.
В июле 1978 г. радиолокатор загоризонтного обнаружения (г. Николаев) посетил заместитель председателя Совета министров СССР – председатель Военно-промышленной комиссии Смирнов Л. В. (автор исполнял обязанности директора филиала). Состоялась очень напряженная беседа по итогам работ и задачам загоризонтного обнаружения. Особенно был заострен вопрос по обнаружению крылатых ракет. Я впервые по-настоящему осознал, какое страшное средство поражения пунктов управления, аэродромов, пусковых установок ракет и других важных военно-государственных целей представляют крылатые ракеты.
После создания экспериментального тракта начались натурные работы по обнаружению заказных самолетов Ту-16, МиГ-29 и попутных гражданских самолетов на трассе Уральск – Алма-Ата. Заказные самолеты вылетали с аэродрома в районе г. Приозерский (Сары-Шаган) на дальности Д – 3150 км. Ускоренной отработке алгоритмов очень помогло то, что реальные сигналы, отраженные от самолетов, в цифровом виде записывались на жесткие магнитные диски. Это позволяло пользоваться ими неоднократно различным группам разработчиков алгоритмов (метод распараллеливания) для отработки различных вариантов построения алгоритмов и выбирать из них оптимальные по критериям минимума отношения сигнал/шум и минимума ложных тревог.
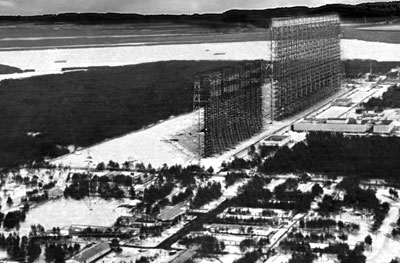
Радиоприемный центр РЛС «Дуга» 5Н32. Радиолокатор обладал поистине циклопическими размерами. Приемные полотна были протяженностью 900 и 500 метров, высотой 140 и 90 метров соответственно. Передающее полотно имело длину 300 метров
Фотоархив «ВКО»
В этот же период были проведены эксперименты по обнаружению пары самолетов, летящих на различных высотах – 10 тыс. и 300 м. Результаты обнаружения были равными. Это подтвердило наши предположения, что обнаружение самолетов не зависит от высоты (в будущем это стало предвестником обнаружения взлета-посадки самолетов).
В это же время были разработаны критерии надежности обнаружения сигналов от ВЦ на основе спектрального анализа сигнала ВНЗ. Проведены различные эксперименты по обнаружению вертолетов, стартов ракет по корпусу, оценки спектров сигналов ВНЗ-1, сигналов, отраженных от различных типов самолетов. В 1980 г. НИЭР была завершена, и в 1981 г. председателем комиссии по приемке НИЭР назначен начальник РТВ ПВО СССР Береговой М. Т.
Председатель комиссии Береговой М. Т. подробно ознакомился с принципами построения экспериментального тракта обнаружения ВЦ, был приятно удивлен, что вся обработка у нас ведется в цифровом виде на тех же СЦВМ, на которых реализованы боевые алгоритмы ЗГ РЛС «Дуга № 1» (г. Чернобыль).
В одной из доверительных бесед, с глазу на глаз, автор впервые услышал из уст руководителя такого высокого ранга: у командования ПВО СССР есть сомнения, что ЗГ РЛС «Дуга № 1» (г. Чернобыль) будет принята на боевое дежурство. Всему виной, конечно же, приполярная трасса. Тогда и был впрямую поставлен вопрос: можно ли ЗГ РЛС «Дуга № 1» использовать для обнаружения воздушных целей?
Автор ответил утвердительно, тем более я уже знал, что сигнал ВНЗ-1 присутствует на этой трассе не менее 95%. И мы договорились отразить это в акте комиссии. Но в Москве, в головном институте с этим были не согласны. Вопрос перешел в более высокие инстанции министерства, ВПК, ЦК КПСС, но я в этом уже не участвовал. В результате всех этих обсуждений главком ПВО на пятилетку 1981–1985 гг. не включил ОКР загоризонтного обнаружения ВЦ (версия автора).
Но это время мы не потеряли, а использовали для отработки алгоритмов: а) сопровождения; б) классификации состава цели – одиночная, групповая, количество самолетов в группе; в) классификации типа целей – тяжелый (Ту-16, Ил-62, Ту-154, Ту-134), легкий (МиГ-23, 25, 29) и др.
В 1982 г. начались работы по модернизации ЗГ РЛС «Дуга № 1» (г. Чернобыль) и я был назначен заместителем главного конструктора. Модернизация проводилась таким образом, чтобы в любой момент можно было использовать ЗГ РЛС «Дуга № 1» (г. Чернобыль) для обнаружения ВЦ.
В марте 1984 г. автор был назначен техническим руководителем ЗГ РЛС «Дуга № 1». К сожалению, в апреле 1986 г. случилась авария на Чернобыльской АЭС и приемная позиция была закрыта (попала в 30-километровую зону отчуждения).
На следующую пятилетку (1986–1990 гг.) в постановление ЦК КПСС и СМ СССР была включена ОКР «Корона» для обнаружения ВЦ. В 1987 г. автор статьи назначен главным конструктором ОКР «Корона». Начали с разработки эскизного проекта и создания экспериментальной ЗГ РЛС «Корона-Э», на которой были завершены разработки всего комплекса алгоритмов обнаружения, сопровождения, классификации, взлет-посадка, в том числе адаптация к ионосферным и помеховым условиям.
Всегда помня о задачах, поставленных председателем ВПК Смирновым Л. В., автор статьи предложил приемную антенну длиной 1200 м (256 мачт с четырьмя ярусами крестообразных вибраторов – две поляризации). ЗГ РЛС «Корона» должна была увеличивать отношение сигнал/помеха не столько за счет увеличения энергетического потенциала передающей позиции, сколько за счет использования узких парциальных диаграмм направленности (ДН) приемной позиции (длина антенны – 1200 м), перекрывающих широкую ДН передающей антенны.
Это стало возможным при наличии мощных вычислительных комплексов, то есть своеобразным интеллектуальным выигрышем. На этом же этапе были рассмотрены и применены при разработке и изготовлении двухполяризационные вибраторы, что увеличивало потенциал приемной позиции на 3 дБ. На этапе ЭП были рассмотрены вопросы и проведены эксперименты по построению цифровых адаптивных антенн с малым уровнем боковых лепестков и построением «нулей» в направлении нескольких источников помех.
На передающей позиции главным техническим вопросом была разработка линейно-частотно-модулированных (ЛЧМ) зондирующих сигналов, обладающих минимальным спектром внеполосных помех. В то же время передающая позиция, обладая высоким энергетическим потенциалом, могла служить средством РЭБ.

Цветных фотографий РЛС «Дуга» не сохранилось. Так могла бы выглядеть ЗГ РЛС на местности (приемный центр)
Михаил ХОДАРЕНОК, Юлия ГОРЕЛОВА
В 1987 г. вышли к заказчику с предложением провести эксперименты по выводу истребителей-перехватчиков в зону обнаружения целей на дальностях до 2500 км. Командование ПВО СССР согласилось, особенно активно помогал нам начальник ГУВ Войск ПВО Сапегин С. С. Эксперименты с использованием истребителей-перехватчиков МиГ-31 прошли успешно, и было принято решение создавать тракт наведения в составе ЗГ РЛС с автоматической передачи сигналов телеуправления и доработки бортовой аппаратуры.
За время экспериментальных работ – с 1978 по 1988 г. были проведены обнаружения более 400 самолетовылетов, как одиночных, так и групповых, вертолетов, стартов баллистических ракет по корпусу и т. д. Это говорит о большом и тщательно проделанном комплексе работ и готовности коллектива переходить к созданию ЗГ РЛС «Корона».
Таким образом, к концу завершения эскизного проекта (ЭП) был готов весь комплекс алгоритмов обнаружения, сопровождения, классификации, адаптации к ионосферной и помеховой обстановке, разработан комплекс конструкторской и строительной документации, изготовлены образец 32-канального приемника, устройство новых зондирующих сигналов (ЛЧМ) и др. Эскизный проект был принят в начале 1989 г., а в мае того же года утверждено министром радиопромышленности СССР и главнокомандующим ПВО СССР техническое задание (ТТЗ) на ОКР «Корона».
Уже на этапе разработки конструкторской документации и изготовления аппаратуры в 1990 г. были проведены интересные работы по обнаружению самолета-разведчика АВАКС в Северном море на дальности 2,5 тыс. км с помощью приемной антенны «Корона-Э» и передатчика г. Чернигов. Это соответствует бистатической ЗГ РЛС (расстояние между приемной и передающей позициями – 500 км).
Работы проведены с помощью батальона радиоразведки, который дал ориентировочный пеленг на АВАКС, а ЗГ РЛС потом его обнаружила. Это вызвало большой интерес у заказчика, и мы включили в состав алгоритмов комплексирование с радиоразведкой. Таким образом, система ЗГ РЛС – «глаза» дополнилась системой радиоразведки – «уши».
Своеобразным пиком расцвета экспериментальной ЗГ РЛС «Корона-Э» явились учения Войск ПВО СССР в феврале-марте 1991 г. «Зима-91», в которых станция приняла участие. Нам было поставлено много задач военного назначения. Военными посредниками были начальник разведки Войск ПВО генерал Чирков В. П. и несколько старших офицеров. Все задачи были выполнены, в том числе наведения истребителей-перехватчиков МиГ-31 и Су-27 на группу бомбардировщиков. Сразу после окончания учения на КП станции прибыл главнокомандующий Войсками ПВО генерал армии Третьяк И. М. с группой генералов. Там были поставлены перед генералами задачи боевого применения загоризонтных радиолокаторов в войсках ПВО.
ОКР «КОРОНА»Целью ЗГ РЛС «Корона» являлось вскрытие подготовки и начала воздушного нападения. Для обеспечения заданной цели необходимо было осуществлять контроль воздушной обстановки в западном стратегическом направлении, районов дислокации 2 и 4-й ОТАК НАТО, 3-й ВА США, частично 5-й ОТАК и зоны балтийских проливов.
Как известно, в этих районах было сосредоточено более двух тысяч военных самолетов и еще более гражданской авиации. Поэтому контроль за действиями военных самолетов должен осуществляться на фоне полетов гражданских (пассажирских, грузовых) самолетов. Это требовало разработки базы данных (БД), которая входила в вычислительный комплекс КП, и разработки целого комплекса новых алгоритмов – системы интеллектуальной поддержки принятия решения (база знаний – БЗ).
В соответствии с эскизным проектом ЗГ РЛС «Корона» размещалась на двух позициях. Приемная позиция – в Могилевской области. В качестве передающей позиции использовалась передающая позиция, оставшаяся от ЗГ РЛС «Дуга № 1» (г. Чернигов). В 1989–1991 гг. проводились работы по рекогносцировке, землеотводу, производству аппаратуры, СЦВМ и антенн на заводах-изготовителях.
НФ НИИДАР взял на себя разработку алгоритмов контроля действий военной авиации НАТО. Это был уже «мозг» станции, который мы называли системой интеллектуальной поддержки принятия решений, базой знаний и др. Забегая вперед, скажу, что НФ (с 1991 г. – Украинский радиотехнический институт) закончил разработку и автономную отладку программно-реализованной базы знаний в 1995 г.
В состав системы интеллектуальной поддержки принятия решения входит 16 алгоритмов решающих правил различных признаков воздушной обстановки. Результаты работы каждого алгоритма объединялись в соответствии с весовыми характеристиками в комплексном боевом алгоритме (КБА), информация от которого поступала на КП станции.
Можно сказать, что в результате работы БЗ, а она хранила и использовала информацию в секторе контроля в течение месяца, вырисовывался замысел верховного командования НАТО по подготовке и началу воздушного нападения. В состав вычислительного комплекса КП входила база данных (БД) о всех аэродромах, характеристиках взлетных полос (длина, ширина, азимут и др.), количестве самолетов и т. п.
К середине 1990 г. была разработана рабочая конструкторская документация, выданы ТЗ на программирование всех алгоритмов, поставлены на объект ЭВМ 66И6 и одна СЦВМ производства НИИДАР для отработки программного обеспечения. В 1990–1991 гг. совместно с Институтом теплотехники (г. Москва) рассматривали очень интересное предложение об увеличении эффективности тракта наведения.
После распада СССР в начале 1992 г. нам пришла телеграмма о прекращении финансирования ОКР «Корона», «Корона-Ю» со стороны ГУВ Войск ПВО России.
ОКР «КОРОНА-Ю»
В 1990–1991 гг. ожидалось нападение США на Ирак, которое состоялось в начале 1991 г. Решением ВПК нам поставили задачу создания ЗГ РЛС «Корона-Ю» в направлении на Багдад на базе аппаратурного комплекса экспериментальной ЗГ РЛС «Корона-Э». Разрабатывало передающую антенну для новой ЗГ РЛС «Корона-Ю» Гомельское конструкторское бюро, которое разрабатывало антенны и для боевой ЗГ РЛС «Корона».
Приемное антенное полотно для ЗГ РЛС «Корона-Ю» было упрощенным вариантом: длина – всего 625 метров, количество вибраторов – 128. Приемное антенное полотно по нашему заданию разрабатывал НИИДАР, он же изготовил 128 простейших вертикальных несимметричных вибраторов. Всю остальную разработку документации и изготовление аппаратуры поручили НФ НИИДАР. В конце 1991 г. филиал перешел под юрисдикцию Украины, получив новое название – Украинский радиотехнический институт (УРТИ). После распада СССР в начале 1992 г. институт остался без работы.
Только в мае 1992 г. после тяжелых походов по кабинетам новых военных начальников Минобороны Украины мы продолжили работы по созданию ЗГ РЛС «Корона-Ю», а разработку системы интеллектуальной поддержки принятия решения проводили в рамках ОКР «Корона-У».
В начале 1993 г. завершен первый этап создания ЗГ РЛС «Корона-Ю» и мы перешли на опытное дежурство в южном направлении. На ЗГ РЛС «Корона-Ю» уже был реализован принцип широкой передающей ДН и восьми узких парциальных приемных ДН. Финансирование было скудное, инфляция все съедала, и все, кто работал тогда, понимали, как было трудно что-то создавать. Но в те времена мы неоднократно обнаруживали АВАКС на границах между Ираком и Саудовской Аравией, полеты авиации США над территорией Ирака.
В течение 1992–1994 гг. была изготовлена вся аппаратура, в том числе резервная, отработаны алгоритмы и программы, создан КП и тракт боевого управления наведением. Реализованы тракты адаптации к ионосферной и помеховой обстановке. Все алгоритмы обнаружения, сопровождения, классификации, адаптации, командного пункта были программно реализованы на персональных компьютерах (ПК). Для алгоритмов обнаружения, сопровождения персональные компьютеры были дополнительно усилены платами цифровой обработки сигналов. В июле 1995 г. заказчику сдан очередной этап ОКР. Но работы были приостановлены самим заказчиком.
В 1991–1995 гг. институт серьезно работал над базой знаний в рамках ОКР «Корона-У». Все 16 алгоритмов были реализованы на персональных компьютерах, сервер-компьютер принимал радиолокационную информацию с КП станции и раздавал ее на все ПК базы знаний. Результаты обработки собирались на сервере и в виде интеллектуального решения передавались на КП станции. В мае 1995 г. мы сдали заказчику очередной этап и должны были перейти к заводским испытаниям. Однако практическую отработку взаимодействия «Корона-Ю» и «Корона-У» мы не начали, так как по телеграмме заказчика работы были приостановлены. В 1995 г. прекращено финансирование ОКР «Корона-Ю» и «Корона-У». С загоризонтной радиолокацией на Украине было покончено.
ВМЕСТО ЗАКЛЮЧЕНИЯОчень хорошо, что в России и руководство НИИДАР, и заказчик работы по загоризонтной радиолокации не прекратили. Несмотря на скудное финансирование, был создан первый образец. Я так подробно описал все работы и достижения, полученные в течение многих лет экспериментальных работ, чтобы показать: загоризонтная радиолокация не только развивалась в теоретическом направлении (эскизные проекты, технические предложения, технические записки и др.), но и имеет большой практический опыт как разработки алгоритмов обнаружения, сопровождения, классификации по типам и составам целей, так и адаптации к ионосферным и помеховым условиям, базы данных и базы знаний.
Опыт прошлых лет показал, что загоризонтный радиолокатор является не только средством добывания радиолокационной информации, но и мощным средством интеллектуальной обработки этой информации, позволяющим решать задачи своевременного обнаружения подготовки воздушного нападения (главная задача ЗГ РЛС – обнаружение именно подготовки воздушного нападения, потому как обнаружение воздушного нападения – это уже война).
Рассматривая систему ЗГ РЛС и систему интеллектуальной поддержки принятия решения именно с такой точки зрения, можно утверждать: ЗГ РЛС резко повысила свой интеллектуальный уровень. Ведь имеется целый ряд особых признаков, по которым можно надежно и своевременно определять подготовку к началу войны, а это уже другой уровень информированности высшего военного руководства, а значит, и принятия решения.
В ЗГ РЛС уровень отработки задач обнаружения, сопровождения, классификации воздушных целей (и системы интеллектуальной поддержки принятия решения, взаимодействия (комплексирования) с другими средствами) существенно увеличивает информационные возможности системы воздушно-космической обороны. У России много мест, неприкрытых от воздушного нападения, и она должна создавать систему загоризонтной радиолокации.
Современный загоризонтный радиолокатор, построенный на современной вычислительной технике, используя работы по развитию искусственного интеллекта, математических методов обнаружения, классификации по типу и составу целей и способов адаптации к сложным ионосферным и помеховым условиям, имеет большие возможности решения сложных задач и должен занимать достойное место в системе ВКО.
Опубликовано 4 июня в выпуске № 3 от 2013 года
- Комментарии
- Vkontakte
- Читаемое
- Обсуждаемое
- Past:
- 3 дня
- Неделя
- Месяц
В чем вы видите основную проблему ВКО РФ?









